凯时娱乐官网点击下图进入官网:

凯时娱乐官网点击下图进入活动:

凯时娱乐官网点击下图进入领取彩金:

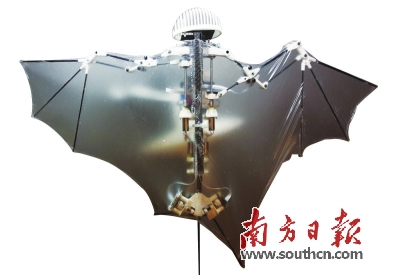







蝙蝠可以自主飞行机器人的封面上科学、机器人技术。研究小组称,他们模仿蝙蝠的生理结构,使用新材料来创建这种机器。小,重约93克,翼展约47厘米,能够像蝙蝠一样飞。
事实上,尽管四轴飞行器领域的无人机(uav)已被广泛使用,但它仍然是相去甚远的本质“制造”飞行动物,如鸟类和蝙蝠。动物尤其是蝙蝠飞行机制,是一种最复杂,模仿“蝙蝠”机器人的结构能适应四轴飞行器不能发挥的特殊环境,广泛的用途。
值得注意的是,“科学、机器人、系的顶级学术刊物《科学》杂志ZiKan,去年12月开始。今天的蓬勃发展,人工智能杂志报告“机器人”蝙蝠,敦促美国的另一个分支机器人,仿生机器人。
一些专家指出,传统的仿生机器人“形状和上帝不喜欢”问题。目前,学术界是柔软的混合结构、仿生结构,材料,驱动集成,精细控制的神经元,高效的能量转换系统类生活的方向。近年来,已经有大量的机器,机器苍蝇蝴蝶或广泛的应用前景,新概念或设计的仿生机器人。
窗口“蝙蝠”机器人可以实现自主飞行
也是飞行生物,蝙蝠比更难以模仿鸟类飞行能力:支持不同鸟类的翅膀中空的骨头简约的结构,作为哺乳动物的蝙蝠,机翼是由强壮的骨骼和关节和皮肤。科学家们发现,蝙蝠的翅膀非常灵活,有40多个关节,科学家称之为“自由”40度。
“蝙蝠飞行能力是空中机器人的梦想。它可以执行复杂的飞行技能,如栖息地和快速完全颠倒。蝙蝠翅膀的运动非常复杂,有40多个关节和非常薄膜的翅膀。”相应的作者、加州理工学院的教授很快——乔Chung说。
由于柔性接头,科学家发现,蝙蝠可以类似于“弯肘”或“翻腕”向前或向后移动飞行控制。,在每个机翼跳期间,一些长着翅膀的骨头打变形,来控制飞行的态度。蝙蝠和鸟类相比,有难以置信的机动性,昆虫翅膀拦截。早些时候,南加州大学的一项研究显示,鸟类通常只有借助翅膀向下运动产生升力,在蝙蝠飞行的时候,翅膀向上运动也可以产生升力。
蝙蝠灵活的翅膀以钦佩的科学家,但制造业“机器人”蝙蝠也非常困难,因此,控制机器人建模,设计并提出了许多技术上的挑战。伊利诺伊大学香槟分校,香槟和加州理工学院的科研团队经过几年的探索,开发了去年,蝙蝠“机器人”蝙蝠Bot(B2),爬到2017年2月,最新一期的“科学、机器人、封面。
由于各种各样的限制,团队的结构尚未完全模仿蝙蝠的翅膀,他们只把蝙蝠的五个自由度:手肘,肩膀,腿,手腕的运动和尾巴。虽然远离蝙蝠,但团队认为,“机器人”蝙蝠可以复制蝙蝠飞超过57%的行动。
最明亮的“机器人”蝙蝠飞行没有远程操作,而是通过机载计算机和几个传感器控制,根据不同的环境自主导航。很快——乔涌介绍,为了实现“蝙蝠”机器人自主飞行,它使用一个自定义的机载电子元件、导航和控制算法在实时运行在主控制板,和处理传感器数据和控制制动与单一的数据收集器。传感器包括一个惯性测量单元(IMU)和五肘,髋关节磁编码器和翅膀。
乔- Chung说,目前,“机器人”蝙蝠成功直接到30米,通过调整左边和关节的尾巴,薄膜的变形,从而实现自主飞行。这些关节协调复杂算法,机器人可以像蝙蝠飞,包括倾斜盘旋俯冲。
蝙蝠“飞机,相比之下,四轴机器人有许多实用的优点:在某些环境中,“蝙蝠”机器人最重要的优点是柔软的翅膀。它不喜欢四轴转子飞机或其他飞机,由于其刚性材料和高噪声的螺旋桨对人类造成潜在的威胁。相比之下,翼部主要由柔性材料的蝙蝠甚至机器人碰撞,也不为自己和障碍物造成极大的损害,和低频率翅膀扇动,减少噪音。”,发表在《科学,机器人技术,本文描述了它的优点。
根据这份报告,“机器人”蝙蝠翅膀的灵活的有机硅膜具有高延性,只有56个微米厚;。
骨骼是由碳纤维;。
总重约93克,翼展约47厘米。团队希望这个高度灵活的机器人可以代替四旋翼无人机(uav)成为人类的好帮手,它的翅膀可以是任何形状,以避免在施工测量光束,或者帮助救援在危险地区进行调查。当然,“蝙蝠”机器人的研究才刚刚开始。
研究人员表示,当前机器人飞行时间由电池容量有限,和太容易破碎,但不能用于生活
论文还指出,研究人员正在研究如何让蝙蝠颠倒的“机器人”。
人们仍然无法与飞行生物创造一般。鸟类、昆虫和哺乳动物在蝙蝠在数亿年的进化历史中,不断适应环境和最优选择后,在其形式,运动模式,能源使用等。,达到近乎完美的水平,空气仿生机器人的设计提供了一个良好的模型。
今天,虽然人类可以创造巡航马赫数的固定翼飞机,但好飞,人们仍然不能“制造”与自然造物的工艺。
在飞机设计领域,“只要推力,板砖飞到天堂”这是冷幽默的话往往爱好者和专业人士和发展反映了某种的合成工艺方法:通过一个强大的诱因来补偿空气动力学的缺陷。
这导致一个问题:传统的固定翼飞机的大小和飞行速度降低到一定的数量级,产生升力是不足以维持飞行;。虽然旋翼飞机小型化,流动性方面仍缺乏需求,鸟类和蝙蝠距离越远。而人类迄今为止开发没有人可以比较和鸟类或昆虫扑翼飞行器,但扑翼飞行是一个完美的飞行模式验证了大自然。
例如,马赫的速度3 SR - 71超音速飞机,机身长度可以飞越每秒32倍。然而,当一个正常的鸽子飞在80 km / h的正常速度,已达到自己的身体长度75倍,一些斯威夫特甚至可以达到每秒140次;。在流动性方面,高机动作战飞机(如- 4空中之鹰战斗机)滚转率大约是每秒720°,而燕子可以超过5000°,第二个紧急刹车,避障,倒特技使飞机尘埃;。
的稳定性和机动飞行,飞机不能飞强气流,且仅在特定条件下进行具体的操作,和鸟类和昆虫重复拍摄和行使扑翼动作,有些人甚至高达1000赫兹的频率,但自己的具有良好的稳定性和机动性,可以快速应对外界变化;。飞机失速攻角最大的约15°,和一些昆虫失速攻角可以达到60°。华南理工大学机械与汽车工程学院的博士。猫认为,飞行的性能优良的生物,人类还无法完全模仿,有很多隐藏背后的原则,法律不是人类。
最早的人类试图飞行,想模仿鸟。在15世纪,列奥纳多·达·芬奇在他的手稿设计一个由人类扑翼模型,被认为是迄今为止最早的设计扑翼飞行器设计。
所谓的“扑翼”,如鸟、昆虫,甚至飞行的蝙蝠的翅膀
但是载人扑翼飞机没有长途飞行成功的先例
1991年多伦多大学的扑翼飞行器的载人实验失败,一些学者分析认为,在扑翼飞行器设计,重量和大小直接:当实验飞机增加驱动和控制设备后,76倍增加体重,和车辆大小分为四个时期,增加升力平衡重量,所以不能真正实现飞行
到目前为止,扑翼飞行器几乎没有载人的方向研究。
自20世纪以来,微型扑翼飞行器逐渐引起了研究人员的注意。猫说早期的扑翼飞行器的研究主要集中在组织、体育态度、外观,如简单的模仿和扑翼的空气动力学是研究更少。
的困难。扑翼飞行的应用程序。缺乏理论支持等。
猫,指出,近年来,虽然物理原型和理论分析取得了初步成果,但如果你想要完全理解的高升力机制扑翼飞行,及其应用领域的飞机,目前仍存在巨大的挑战。”只是对扑翼运动规律,看似周期性的上下摆动,事实上也覆盖,扭力,褶皱和复杂的弹性变形,这是一个极其复杂的空间运动,每一个点,气动力的变化在时间和空间。
“猫认为。
此外,他还指出,扑翼气动特性的飞行模式在许多方面与其他飞行模式存在明显的差异,不同的生物在几何结构和运动方式也是非常大的差别,“很难用统一的理论来描述。一般来说,扑翼飞行机理的研究是不完美的。
“猫在他的博士论文中写道。猫认为,在仿生学机器人仿生扑翼,流体力学,高级微力学、微电子学、和许多其他学科,和人类对这些学科的研究仍处于初级阶段。
其中,核心问题是“传统的稳态动力学理论在解释鸟类和昆虫扑翼飞行原理时遇到了很大的障碍,运用传统理论计算升力不能克服飞行生物的自身重量”。
事实上,通过大量的鸟类和昆虫飞行能力的观察表明,飞行动物扑翼的非定常升力,经常导致常数2 - 3次,不仅可以充分利用平衡昆虫的重量,还可以用于实现极其复杂和困难的机动飞行
除了等待突破理论上,仿生扑翼机器人也有物质和能量的问题。
猫,一只蜻蜓的翅膀,苍蝇和其他昆虫的质量是由很轻网状结构和薄膜材料,为这种类型的超重量轻、强度高、高灵活的方式的组成、物理和化学和机械性能的生物材料,我们仍然缺乏足够的了解
国家自然科学基金委副主任王工程和材料科学guo-biao称为仿生机器人研究现状的回顾,国内研究者一直关注仿生机器人的发展动态空气,理论和应用的基础上,在这方面做大量的研究工作。南京航空航天大学的非定常涡格法,计算分析了仿鸟扑翼气动特性的复杂振动,并相应地做出几种不同尺寸和形状的仿鸟扑翼飞行器。
Guo-biao王还说,北京航空航天大学长期以来一直从事昆虫飞行理论的研究,通过观察方法,理论计算和仿真研究昆虫飞行,盘旋,把实现的作用机制,为设计提供理论依据的微扑翼飞行器
如何使。
“机器人”蝙蝠翅膀的灵活的有机硅膜具有高延性,只有56个微米厚;
骨骼是由碳纤维;。总重约93克,翼展约47厘米。
什么是唯一性
目前,“蝙蝠”机器人可以成功地直接到30米,通过调整左边和关节的尾巴,薄膜的变形,从而实现自主飞行
这些关节协调复杂算法,机器人可以像蝙蝠飞,包括倾斜盘旋俯冲
可以有什么影响。替代四旋翼无人机(uav)成为人类的好帮手,它的翅膀可以是任何形状,以避免在施工测量光束,或者帮助救援在危险地区进行调查。
什么未来。传统的仿生机器人”形状和上帝不喜欢”问题。
目前,学术界是柔软的混合结构、仿生结构,材料,驱动集成,精细控制的神经元,高效的能量转换系统类生活的方向
扩展。仿生机器人的魔力。
1机飞
机已经发展2013年,哈佛大学的团队飞”,重80毫克,翼展只有3厘米,翅膀振动频率是每秒120次。飞行运动原理和苍蝇非常相似,但就像飞在空中盘旋,转;。
此外,它的左边和右边的翅膀可以单独控制,极大地提高灵活性
但“机飞”仍然无法解决电力供应的问题:因为现有的电力供应最轻的达到0
